Kaukokartoituksella tuotetusta 3D-pistepilvistä jalostetaan jo nyt täsmämetsätalouden mahdollistavaa tietoa. Tietoa voidaan tarkentaa huomattavasti älykkäiden metsäkoneiden mittaustietoja käyttämällä. Jo lähitulevaisuudessa laserkeilaimella ja konenäkökameroilla varustetut metsäkoneet voivat mitata ja tunnistaa metsäkuvion puut ja päivittää metsävaratietoa. Pointcloud-hankkeessa tutkitaan taimikonhoidon robotisointia ja 3D-puukartan luomista. Myös yhdyskuntatekniikan koneet ovat pistepilvitutkimuksemme kohteina.
Teknologiamurros työkoneissa
Työkoneissa, myös metsäkoneissa, on tapahtumassa teknologiamurros, jossa koneiden toiminta robotisoituu, muuttuu enemmän autonomiseksi, jopa miehittämättömäksi. Näin on tapahtunut jo satama– ja kaivoskoneissa.
Metsä on kuitenkin erittäin haastava ympäristö, jossa on realistista tavoitella ensin puoliautonomista kuljettajaa avustavaa toimintaa. Tällöin mittalaitteet ja niitä tukeva ohjelmisto antavat kuljettajalle paremman tilannekuvan työskentelystä ja helpottavat haluttuihin tarkkuusvaatimuksiin pääsyä. Metsäkoneen kuljettajan on muun muassa lajiteltava hakatut puut lajeittain ja laaduittain ja lisäksi katkaistava tukit tarkasti määrämittaan. Harvennettaessa tulisi tavoitella tarkasti haluttua tiheyttä, samalla jättäen vain parhaat puut parhaille kasvupaikoille.
Tulevaisuuden kehittyneillä mittalaitteilla voidaan lisäksi kerätä ja päivittää metsävaratietoa. Kun metsäkone mittaa ja mallintaa ympäristöään työskennellessään, voidaan jäljelle jääneet puut ja maastonmuodot mitata tarkasti ja päivittää tulokset metsävaratietoon. Myös kaadettujen puiden tietoja voidaan hyödyntää aikaisemmin kaukokartoituksella kerättyjen mittauksien ja simulaatiomallien tarkentamiseen. Työkoneista onkin tulossa tärkeitä Big Datan tuottajia.
Taimikonhoidossa tarvitaan teknologiapotkua
Suomessa on valitettavan paljon hoitamattomia taimikoita. Taimikonhoito on useimmiten edelleen raivaussahalla tehtävää ammattilaisen käsityötä, eikä osaavaa työvoimaa ole aina saatavilla. Työn koneellistaminen nuoressa taimikossa on erityisen haastavaa, eikä se ole vielä tähän mennessä onnistunut riittävän kilpailukykyisesti mekanisoiduin työkonein. Raivaussaha ja osaava metsuri ovat edelleen kustannustehokas ratkaisu.
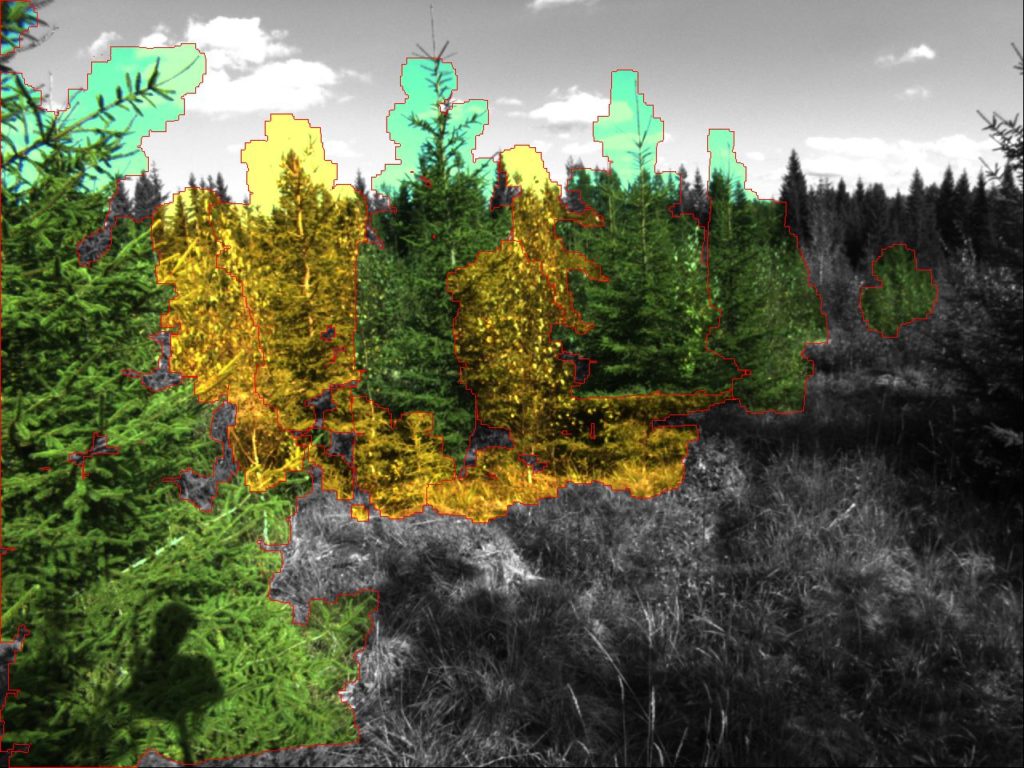
Jotta myös tulevaisuudessa metsämme pysyvät kilpailukykyisinä, tarvitaan koneelliseen taimikonhoitoon tuottavuus- ja kannattavuusparannusta. Tähän pyritään nyt robotiikan ja automaation keinoin. Tutkimuksessamme aistin- ja mittalaitteilla määritetään taimien tai nuorten puiden paikat alustakoneen suhteen ja samalla mitataan metsäpohjan muoto. Tätä varten metsäkoneisiin asennetaan laserkeilaimia ja konenäkökameroita, joiden mittauksista voidaan laskea pistepilvitietoa. Mittauksista luodaan kolmiulotteinen malli, jonka avulla raivauslaitetta voidaan ohjata. Tällöin kone voi välttää vahingoittamasta jäljelle jätettäviä puita ja auttaa kuljettajaa valitsemaan oikeat poistettavat puut.
Kone ja ihmisoperaattori kommunikoivat 3D-käyttöliittymän välityksellä
Autonomisuus tarkoittaa sitä, että kone pystyy mittaamaan ja havaitsemaan ympäristöään, tekemään mittaustensa perusteella päätelmiä ja toteuttamaan tekemiään toimintasuunnitelmia. Jotta ihmisoperaattori pystyy ohjaamaan ja valvomaan koneen toimintaa, koneen on havainnollistettava operaattorille selkeästi havaitsemansa kohteet sekä sen perusteella laatimansa työsuunnitelma.
Tutkimuksessamme tätä toteutetaan kuljettajan virtuaalinäkymän avulla. Kuljettaja näkee joko lisätyn todellisuuden maiseman virtuaalilaseissa tai ylhäältä päin visualisoidun tilannekuvan ruudulla edessään. Tilannekuva on kartan tapainen koneen ympäristötieto, joka päivittyy reaaliaikaisesti.
Virtuaalilaseilla näkökenttään voidaan täydentää koneen mittaamia tietoja kuljettajan metsänäkymän päälle. Tällöin kuljettaja saa samalla kertaa kaiken oleellisen tiedon yksinkertaistetussa muodossa, esimerkiksi koneen tekemä suunnitelma puomin liikkeestä voidaan visualisoida tulevan liikkeen suuntaan osoittavalla nuolella. Käyttöliittymän avulla kuljettaja voi myös nähdä suunnitelmassa jätettävät puut erivärisinä kuin harvennusta kaipaavat puut. Näin kuljettajan on helpompi valita raivattavat kohteet ja päästä lähemmäs oikeaa tavoitetiheyttä.
Yhdyskuntatekniikan koneet
Pointcloud-hankkeessa tutkitaan pistepilviteknologioita metsäympäristön lisäksi myös rakennetussa ympäristössä. Metsäkoneiden yhteydessä kehitettyjä pistepilvimenetelmiä voidaan käyttää myös muissa liikkuvissa ajoneuvoissa ja työkoneissa. Yhdyskuntatekniikassa on valtavasti potentiaalia hyödyntää tulevaisuuden autonomisten ajoneuvojen keräämää tilannetietoa esimerkiksi auraus- ja suolaustarpeen suunnittelussa ja väylien kunnossapidon reaaliaikaisessa monitoroinnissa.
Tutkimuksemme tulokset hyödyttävät yhdyskuntatekniikan koneita valmistavia suomalaisyrityksiä. Alustakoneiden ja niihin liitettyjen työkoneiden mitta- ja aistinlaitteilla voidaan tuottaa työtehtäviä helpottavaa mittaustietoa. Esimerkiksi tieauran kaltevuutta voidaan säätää automaattisesti, jos kone pystyy mittaamaan paikkansa tarkasti tiehen nähden ja tien nykyinen muoto voidaan mitata. Näitä tiedon tuottamisen ja hyödyntämisen mahdollisuuksia ryhdymme systemaattisesti kartoittamaan ensi talvena.
Teksti: Arto Visala ja Heikki Hyyti
Kuva: Mikko Vihlman