Rakennusten sisätilojen ajantasaista 3D-täsmätietoa hyödynnetään monella tavalla teollisuudessa, suunnittelussa, energiatehokkuuden säätelyn apuna ja kulttuurituotannossa. Paikkatietoa hyödyntävien sovellusten määrä ja niihin liittyvä liiketoiminta onkin kasvussa Suomessa ja kansainvälisesti. Alan nousu merkitsee uusia mahdollisuuksia yrityksille ja tuonee merkittäviä säästöjä myös julkisen sektorin menoihin.
Aiemmin mallien tuottaminen on ollut aikaavievää ja hinta on rajoittanut mallien käyttöä. Sisätilojen 3D- mittaus- ja mallinnustekniikat ovat kuitenkin viime vuosina kehittyneet esimerkiksi liikkuvan kartoituksen menetelmien osalta, mikä on laskenut kustannuksia ja tuonut mallit yhä useamman ulottuville. Tehokkaita menetelmiä mallien vaatiman tiedon keräämiseen on monia. Menetelmä valitaan aina kohteen mukaan.
Sisätilojen liikkuvan kartoituksen haasteena on onnistunut paikannus, jota tarvitaan tarkan mallin luomiseen. Ratkaisu ongelmaan on samanaikaisesti paikantava ja kartoittava SLAM-teknologiaan perustuva kartoitusmenetelmä. Se mahdollistaa tehokkaan tiedonkeruun myös kohteissa, joissa satelliitteihin perustuva paikannus ei toimi. Aalto-yliopistossa joulukuussa 2017 julkaistussa Aino Keitaanniemen diplomityössä selvitettiin SLAM (Simultaneous Localisation and Mapping) -käsiskannerin soveltuvuutta rakennuksen geometrian mallintamiseen ja mallien luomisen nopeuttamiseen. Tulokset olivat lupaavia erityisesti sisätilamallien osalta.
Käsiskannerilla nopeasti valmista
Käsiskannerilla mittaaminen on yksinkertaista: kartoittaja kävelee mitattavan rakennuksen läpi laserkeilain kädessä ja laite tallentaa ympäristöstä 3D-pistepilven, josta malli voidaan tuottaa. Mittaus käsiskannerilla on vähintään 10 kertaa nopeampaa kuin sisätilamittauksissa usein käytetyillä maalaserkeilaimilla. Alle 10 metrin mittausetäisyydeltä voidaan hitaasti kävellen luoda pistepilvimalli, jonka tarkkuus on senttimetrien luokkaa. Näin tarkka malli soveltuu hyvin esimerkiksi sisustussuunnitteluun, teollisuuden tarpeisiin ja kulttuuriperintökohteiden dokumentointiin. SLAM-menetelmässä laite paikantaa itsensä ilman erillistä paikannussensoria kuten GNSS-paikanninta. Laite kerää havaintoja ympäristöstään erilaisilla sensoreilla ja muodostaa näistä havainnoista kartan. Kartan ja maamerkkien avulla laserkeilaimen ja inertiamittausyksikön sisältävä laite paikantaa itsensä ympäristöönsä nähden.
Useimmiten lopullinen paikannus tapahtuu jälkilaskennalla, kuten Keitaanniemen diplomityössä tutkitulla ZEB-REVO-keilaimella. Uusimmilla käsikeilaimilla paikannus voidaan toteuttaa myös reaaliaikaisesti. Laitteeseen liitetyn mobiililaitteen näytölle reaaliaikaisesti piirtyvän 3D-pistepilvimallin ansiosta mahdolliset puutteet pistepilvessä havaitaan jo aineistoa kerätessä. Näin voidaan vähentää uudelleenmittausten tarvetta ja tehostaa rakennusmallien luomista entisestään.
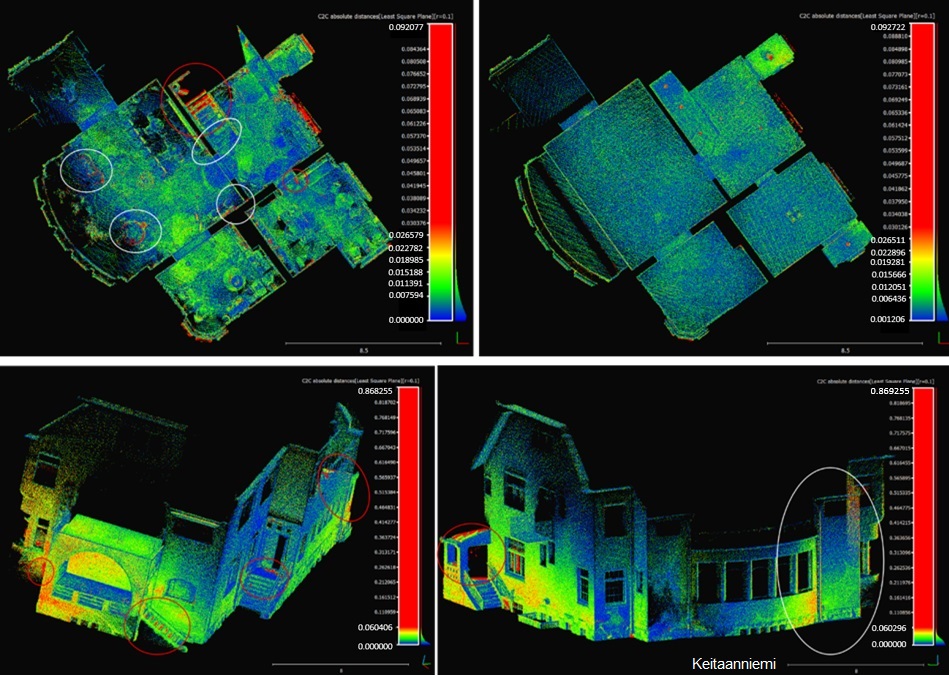
Tutkimuksessa koko ZEB-REVO -aineistoa verrattiin myös maalaserkeilauspistepilveen. Tuloksia edustavat sisätiloissa ylärivin kuvat ja ulkoa alarivin kuvat. Lisäksi kuviin on merkitty suurimmat erot pistepilvien välillä. Valkoisella soikiolla on merkitty peilipintojen tai kasvillisuuden aiheuttamat erot ja punaisilla soikioilla on merkitty kohdat, joista ei ollut maalaserkeilausaineistoa tai kohde oli liikkunut mittausten välissä.
Säästöjä kiinteistönhoitoon ja kilpailukykyä teollisuuteen
Rakennusten 3D-tietomallien hyödyntämisestä on hyviä kokemuksia teollisuusympäristössä. Yhtenä esimerkkinä on suomalaisen teollisuuden kilpailukyvyn parantamiseen tähtäävä Varpu-projekti. Projektissa parannetaan tehdastyöskentelyn tehokkuutta ja turvallisuutta 3D-malliin liitetyn virtuaalitodellisuuden ja lisätyn todellisuuden avulla.
Tarkoille rakennusmalleille on kysyntää myös muualla. Riittävän ja täsmällisen rakennustiedon avulla esimerkiksi kiinteistöjen ylläpitokuluja on mahdollista supistaa merkittävästi. Rakennusten 3D-malleihin liitetyn anturidatan avulla voidaan seurata kiinteistön energiankulutusta sekä lämpöhukkaa ja puuttua havaittuihin ongelmiin nopeasti.
3D- malleihin liitetyn ajantasaisen rakennustiedon avulla kunkin rakennuksen erityispiirteet on mahdollista huomioida ylläpidossa. Oikein kohdennettujen korjausten avulla rakennusten elinkaari pidentyy samalla kun edistetään rakennusten sekä niissä oleskelevien ihmisten terveyttä. Riittävä tieto auttaa lisäksi välttämään ei-toivottuja yllätyksiä remontointivaiheessa, jolloin lopulliset kustannukset ovat paremmin ennakoitavissa. Tämä on hyvä uutinen myös yksittäiselle kiinteistönomistajalle.
Lisää aiheesta DI Aino Keitaanniemen diplomityöstä: http://urn.fi/URN:NBN:fi:aalto-201712188002
Teksti:
Aino Keitaanniemi, Tohtorikoulutettava, Aalto Yliopisto
Tiina Uro, Projektikoordinaattori, Paikkatietokeskus
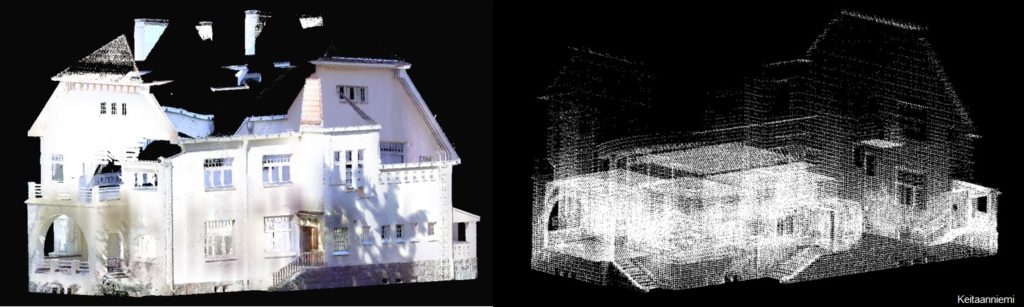
Pääkuvassa tutkimuksen kohteena olleen Tamminiemen pistepilvet siten, että vasemmalla puolella on integroidulla kameralla värjättynä maalaserkeilattu pistepilvi ja oikealla puolella on ZEB-REVO:n pistepilvi.